Uthiralakshmi Sivaraman
Robotics Software Engineer
Recent Robotics Engineering Graduate from Worcester Polytechnic Institute, currently working as a Robotics Software Intern at Void Robotics. Specialized in Computer Vision, Robotics, Machine Learning, and AI.

About Me
I'm a Robotics Engineering graduate from Worcester Polytechnic Institute. At the Manipulation & Environmental Robotics Lab, I worked on camera automation for robotic grasping, using machine learning to improve how robots see and interact with objects.
Previously, at IIT Madras's Healthcare Technology Innovation Center, I developed motion planning software for a surgical robot. I've also interned at the University of Lincoln, UK, where I combined robot simulation with deep learning.
I'm passionate about robotics, computer vision, and AI, and I'm currently seeking full-time opportunities in these fields.
Skills
Programming
Deep Learning & Vision
Robotics
Experience
Robotics Software Intern
Void Robotics
July 2024 - Present

Graduate Robotics Researcher
Manipulation &Environmental Robotics Laboratory, WPI
May 2023 - Apr 2024

Robotics Software Engineer
Healthcare Technology Innovation Center
Nov 2020 - Apr 2022

Software Developer
Rajasri Systems Pvt. Ltd.
Dec 2019 - Apr 2020

Robotics Software Intern
University of Lincoln, UK
Jan 2019 - June 2019
Projects
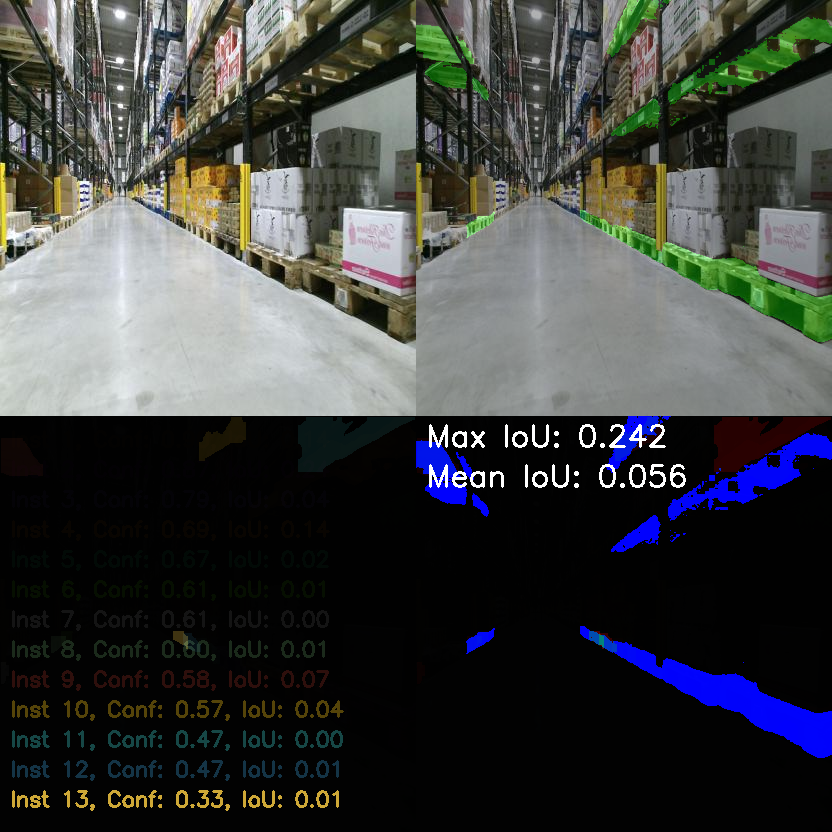
Pallet Detection System
Created and annotated a dataset using Roboflow's pretrained models and SAM2 by Meta Research for segmentation.
Developed an object detection and segmentation pipeline using YOLOv11, achieving 0.59 mAP@50 for detection and 0.95 maxIoU for segmentation.
Predicting Object Dynamics From Image Sequences
Leveraged machine learning techniques to predict subsequent sequences of block pose while manipulating Objects.
Classical Structure from Motion
Reconstructed 3D building structure from multiple views using epipolar geometry.
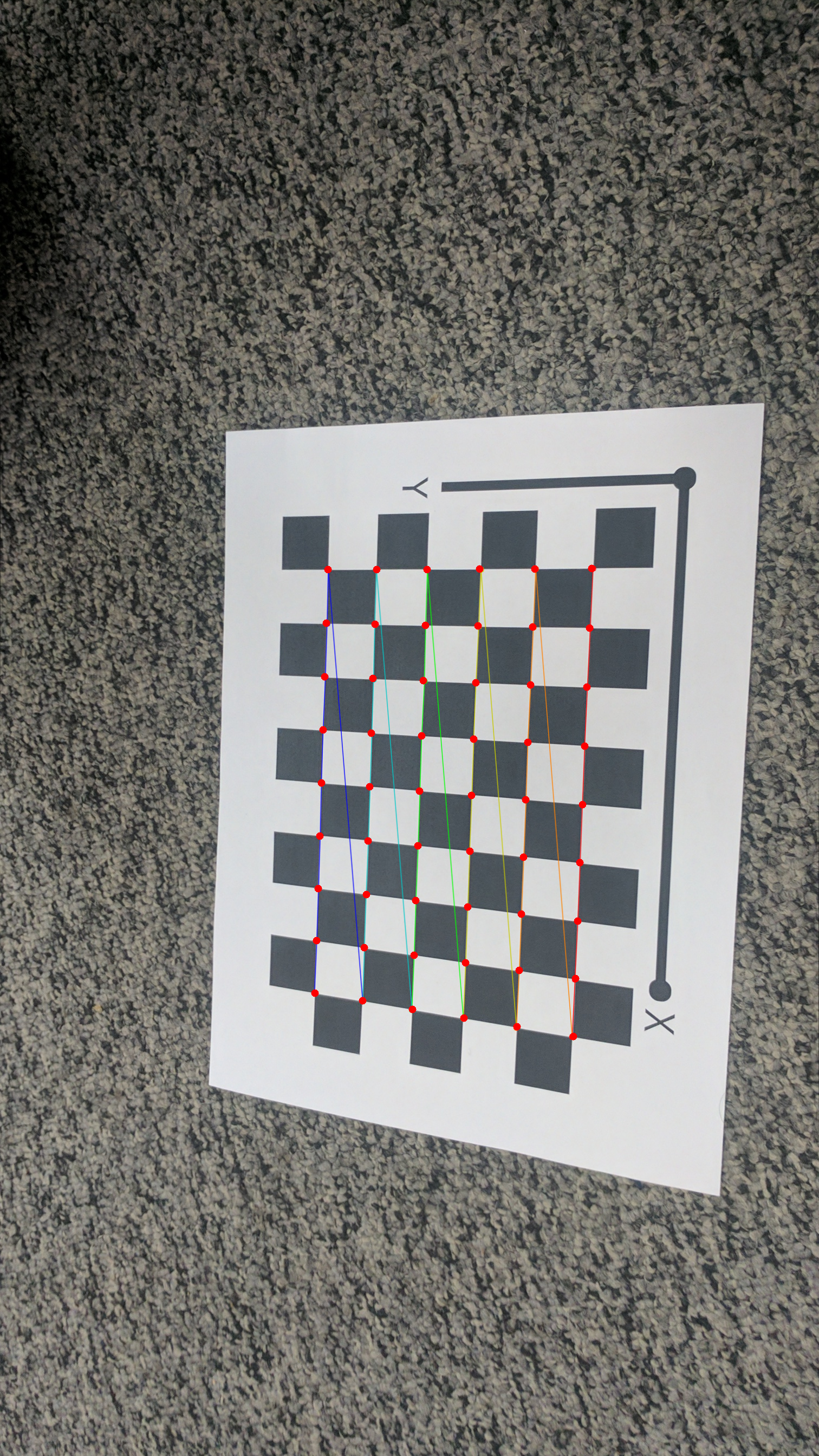
Camera Calibration
Calibrated Camera using Zhang's method and modeled radial-tangential distortion.
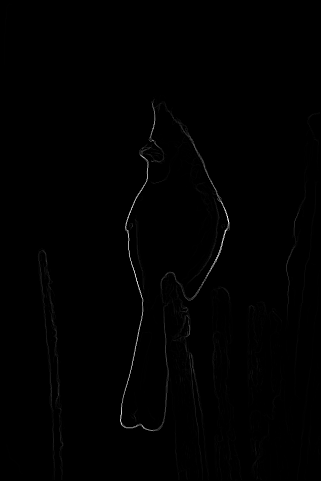
Probability Based Edge Detection
Implemented edge detection using texture, brightness and color map gradients.
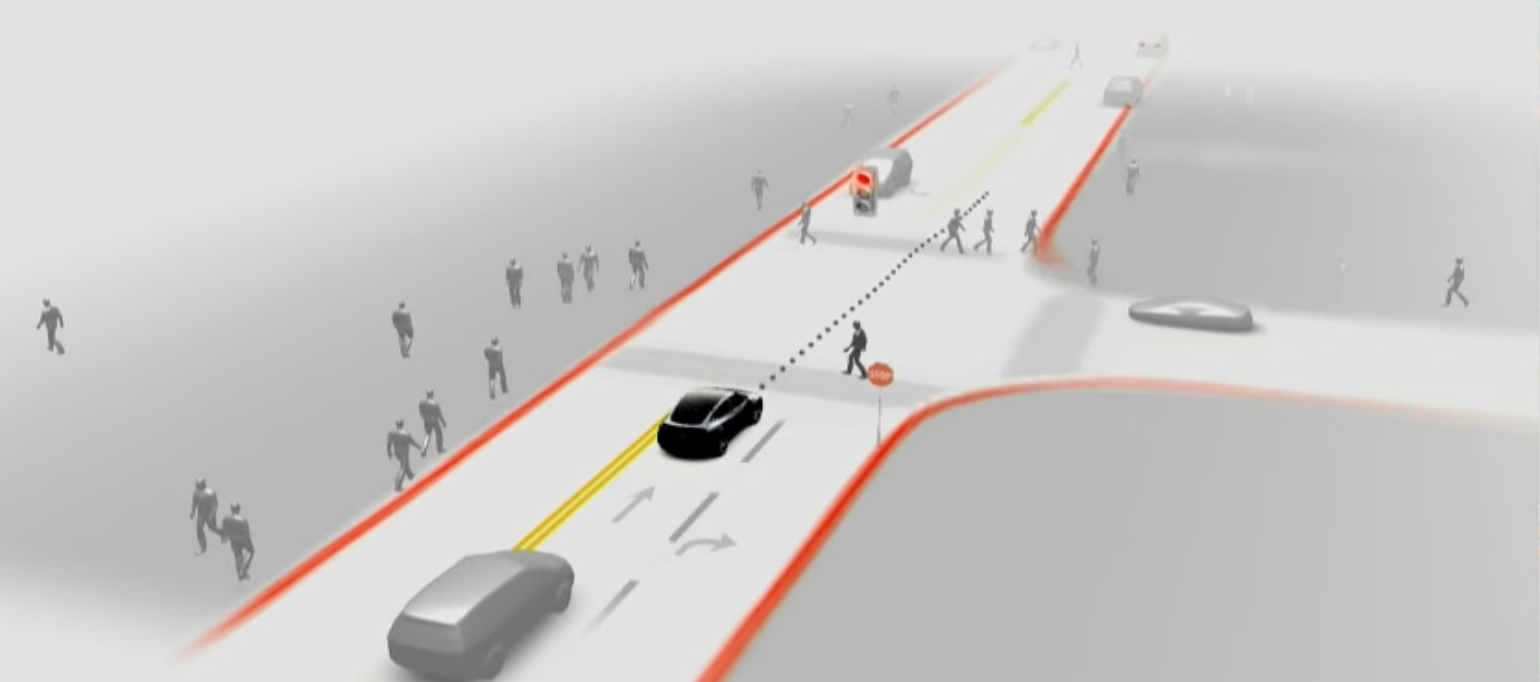
Perception Stack for Autonomous Vehicles
Created a complete mockup of the Perception stack for Self driving cars.
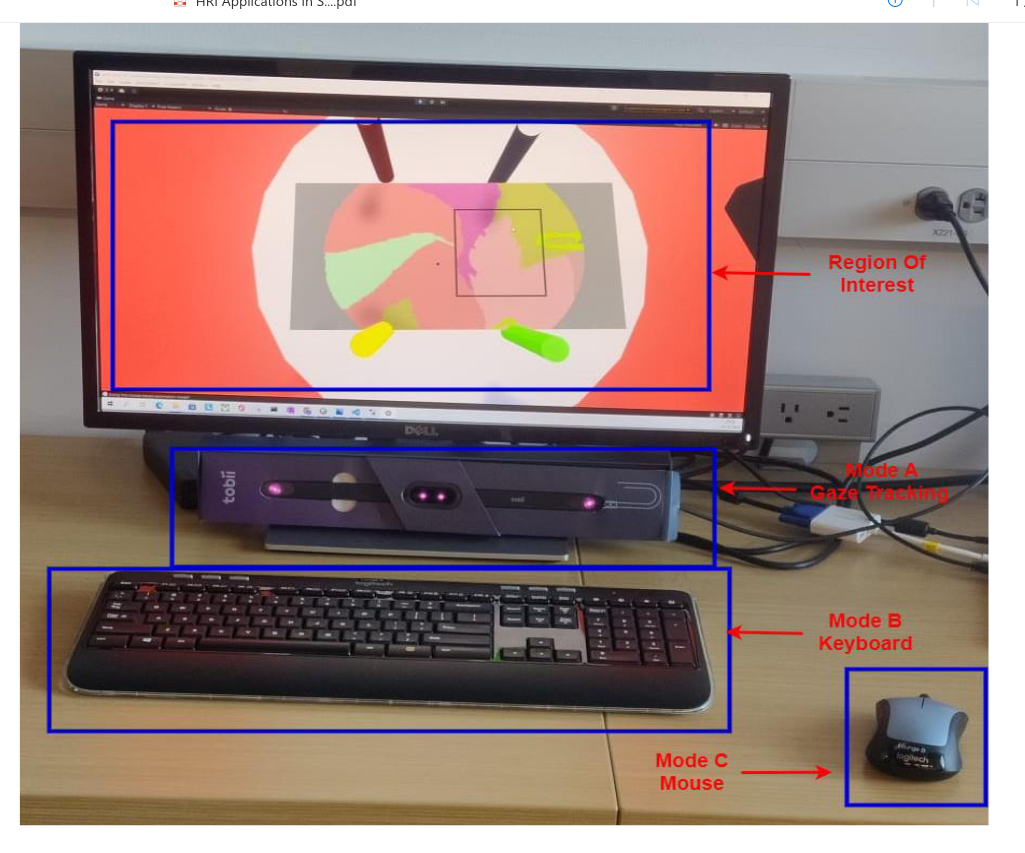
DVRK camera automation using Gaze Tracking and ROI segmentation
Utilized Gaze Tracking to automate DVRK in unity and semantic segmentation using UNET++ to segment and track Region of interest in sugery.

Motion Planning for Spine Surgery Robot
Developed motion planner for MIS and Open Pedicle Screw insertion.
SCARA Robot Simulation
Implemented forward/inverse kinematics and controllers for SCARA robot in ROS2/Gazebo.
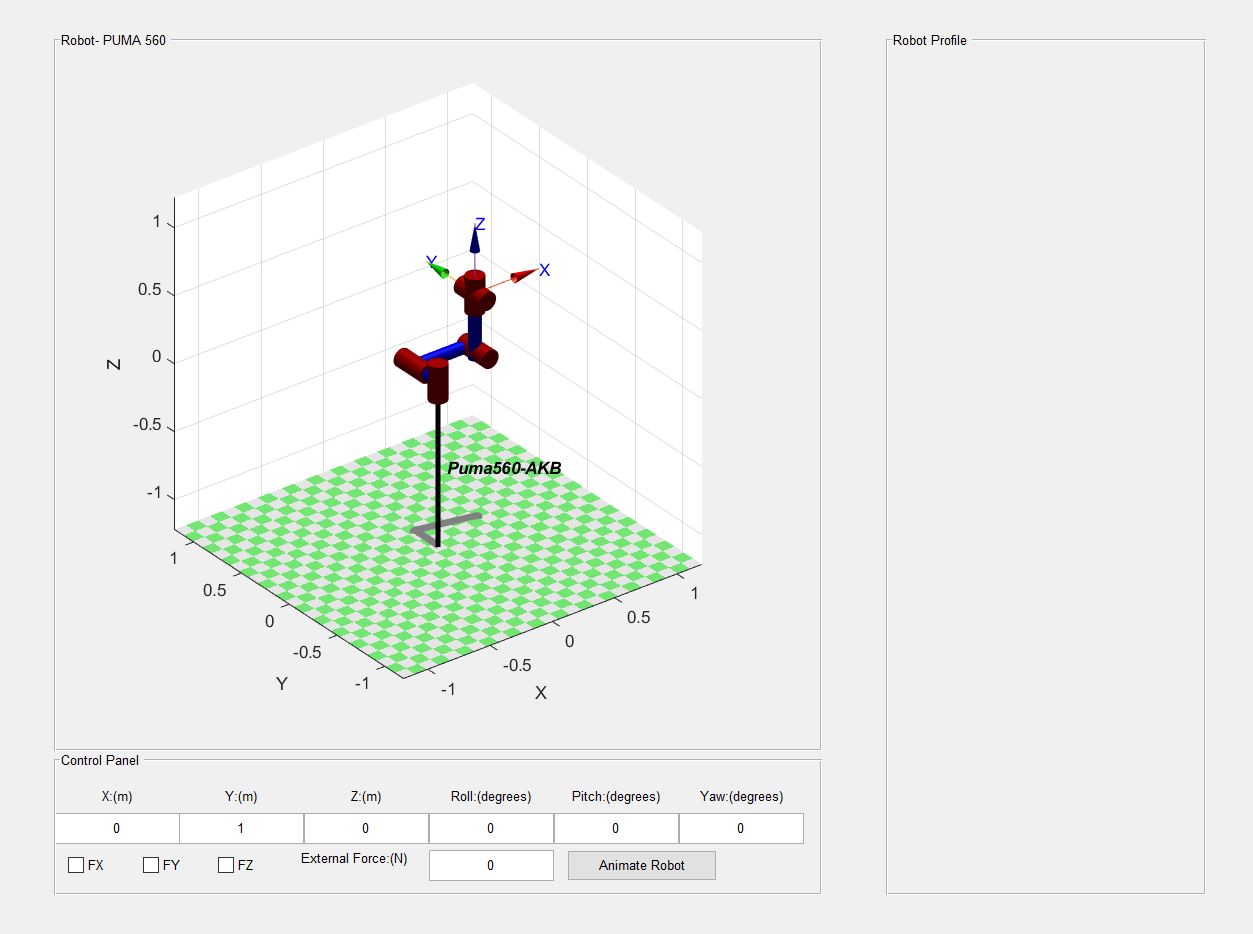
Robot Dynamics GUI Simulator
Implemented the Robot-Dynamics-Simulator, a tool for simulating robot dynamics through a graphical user interface (GUI) using MATLAB.
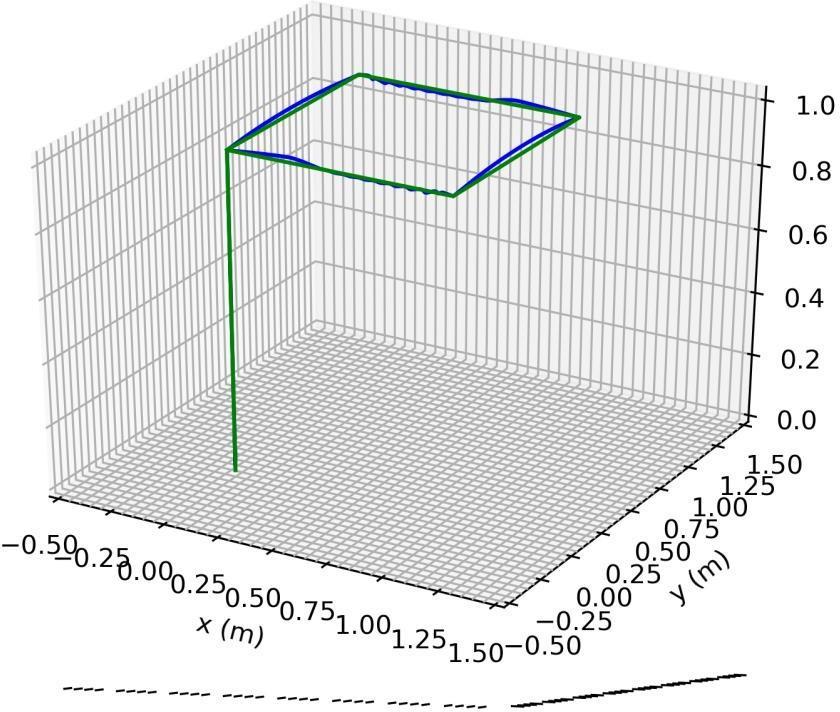
Robust Trajectory Tracking Control
Designed boundary layer-based sliding mode controller for quad-rotor trajectory tracking
Implemented and tested control system on Crazyflie 2.0 MAV
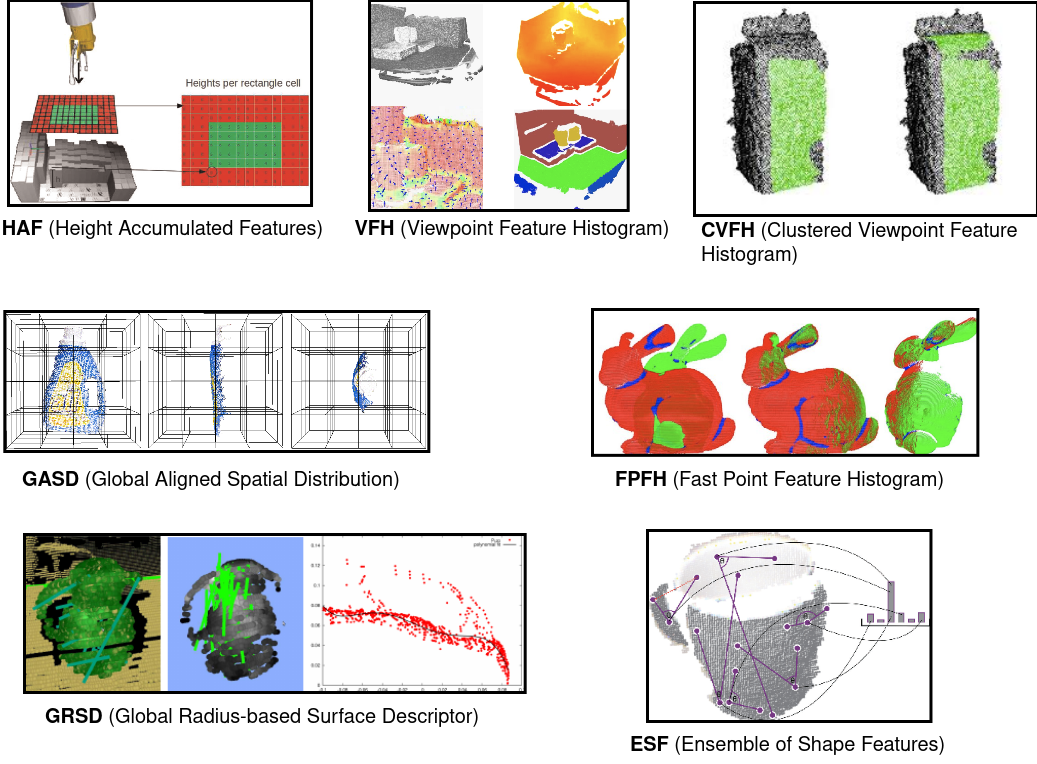
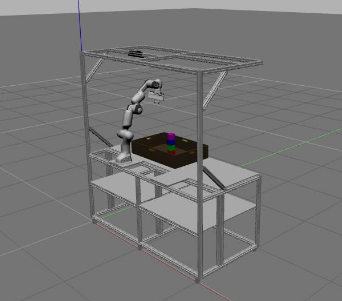
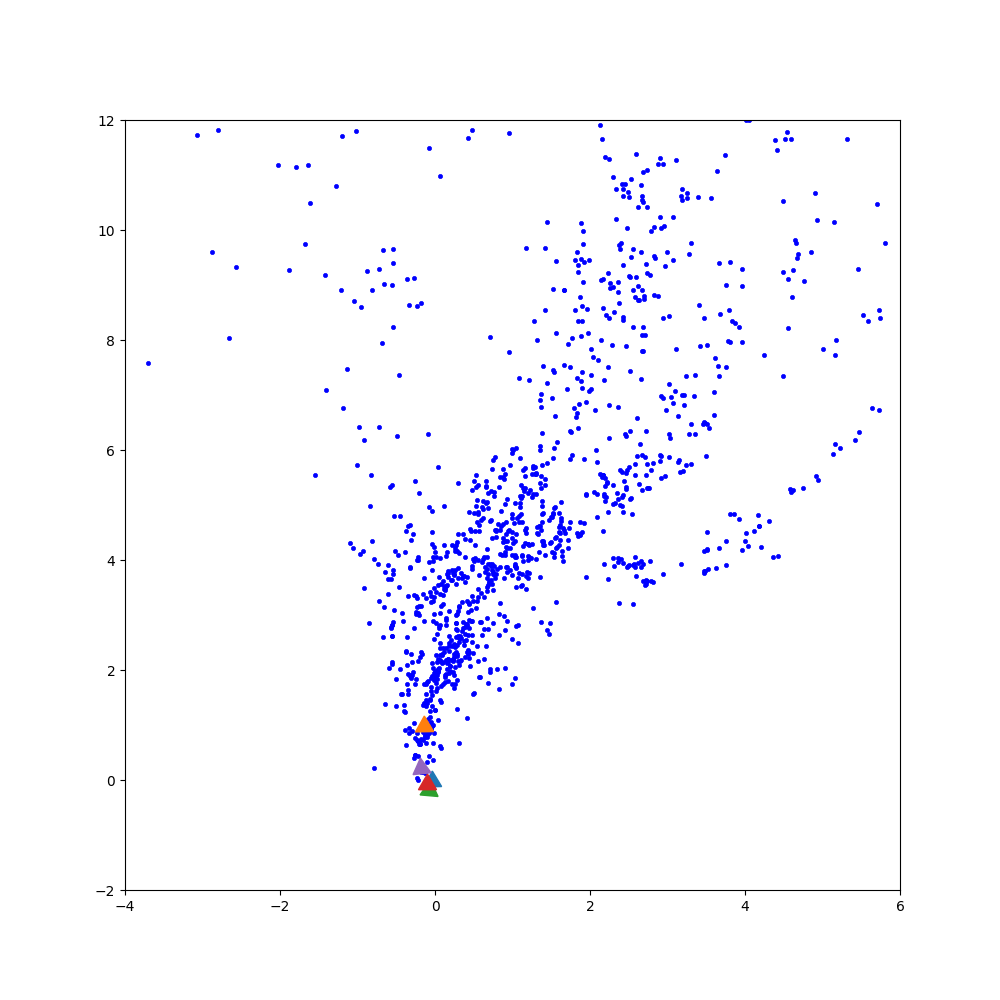
Imitation learning guided Active Vision Robotic Grasping
Advanced camera viewpoint automation on Franka Emika Panda robot through dataset aggregation and epsilon-optimal imitation learning policy evaluation
Focused on rapid 3D object recognition using RGB-D Point Cloud descriptors from Intel RealSense data
Deep RL for Atari Breakout
Implemented and compared various Deep Q learning approaches for Atari games.
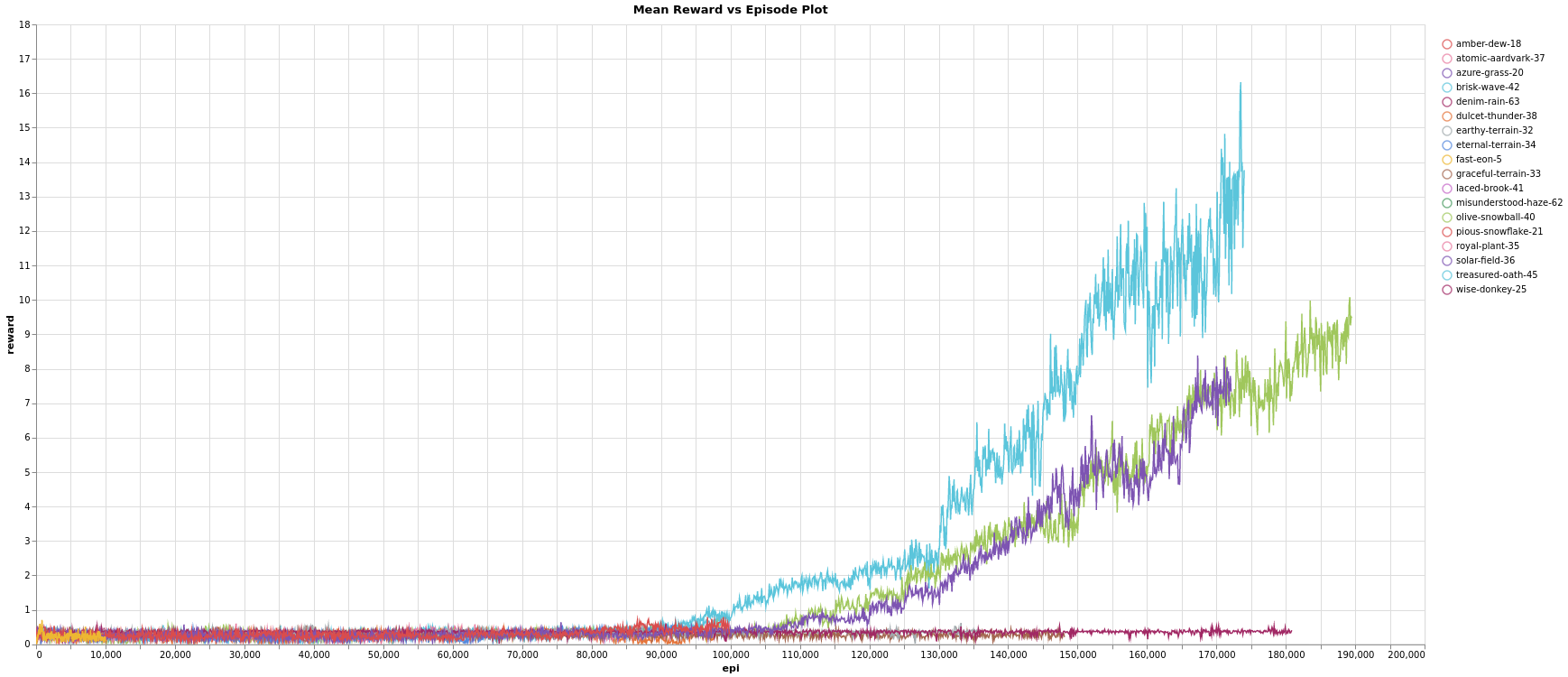
RL-based Mobile Robot Navigation
Implemented DDPG and SAC for mapless motion planning of Turtlebot3.
Volunteer Experience

Volunteer
National Service Scheme
June 2015 - May 2018

Events Head/Treasurer
IEEE SASTRA SB
Dec 2016 - Dec 2018

Street Play Team Leader
Tamil Literary Association, SASTRA
Jul 2015 - Jun 2018